开放接口
Table of Contents
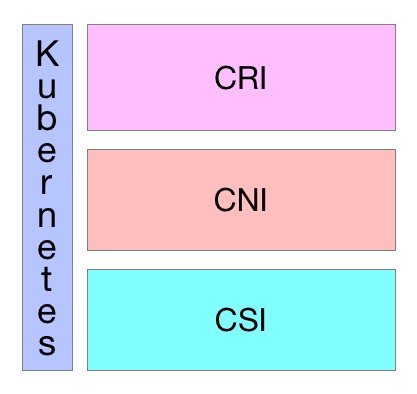
Kubernetes作为云原生应用的基础调度平台,相当于云原生的操作系统,为了便于系统的扩展,Kubernetes中开放的以下接口,可以分别对接不同的后端,来实现自己的业务逻辑:
- CRI (Container Runtime Interface): 容器运行 接口,提供 计算 资源
- CNI (Container Network Interface): 容器网络 接口,提供 网络 资源
- CSI (Container Storage Interface): 容器存储 接口,提供 存储 资源
以上三种资源相当于一个分布式操作系统的最基础的几种资源类型,而Kuberentes是将他们粘合在一起的纽带
CRI
CRI中定义了 容器 和 镜像 的服务的接口,因为容器运行时与镜像的生命周期是彼此隔离的,因此需要定义两个服务。该接口使用 Protocol Buffer ,基于 gRPC ,在Kubernetes v1.10+版本中是在 pkg/kubelet/apis/cri/runtime/v1alpha2 的 api.proto 中定义的
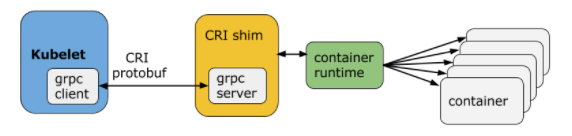
CRI架构
Container Runtime实现了 CRI gRPC Server ,包括 RuntimeService 和 ImageService :
- 该gRPC Server需要监听 本地的Unix socket
kubelet 则作为 gRPC Client 运行
启用CRI
除非集成了rktnetes,否则CRI都是被默认启用了,从Kubernetes1.7版本开始,旧的预集成的docker CRI已经被移除
要想启用CRI只需要在kubelet的启动参数重传入此参数: –container-runtime-endpoint 远程运行时服务的端点:
- 当前Linux上支持unix socket
- windows上支持tcp
例如:unix:///var/run/dockershim.sock、 tcp://localhost:373,默认是unix:///var/run/dockershim.sock,即默认使用本地的docker作为容器运行时
CRI接口
Kubernetes 1.9中的CRI接口在api.proto中的定义如下:
// Runtime service defines the public APIs for remote container runtimes service RuntimeService { // Version returns the runtime name, runtime version, and runtime API version. rpc Version(VersionRequest) returns (VersionResponse) {} // RunPodSandbox creates and starts a pod-level sandbox. Runtimes must ensure // the sandbox is in the ready state on success. rpc RunPodSandbox(RunPodSandboxRequest) returns (RunPodSandboxResponse) {} // StopPodSandbox stops any running process that is part of the sandbox and // reclaims network resources (e.g., IP addresses) allocated to the sandbox. // If there are any running containers in the sandbox, they must be forcibly // terminated. // This call is idempotent, and must not return an error if all relevant // resources have already been reclaimed. kubelet will call StopPodSandbox // at least once before calling RemovePodSandbox. It will also attempt to // reclaim resources eagerly, as soon as a sandbox is not needed. Hence, // multiple StopPodSandbox calls are expected. rpc StopPodSandbox(StopPodSandboxRequest) returns (StopPodSandboxResponse) {} // RemovePodSandbox removes the sandbox. If there are any running containers // in the sandbox, they must be forcibly terminated and removed. // This call is idempotent, and must not return an error if the sandbox has // already been removed. rpc RemovePodSandbox(RemovePodSandboxRequest) returns (RemovePodSandboxResponse) {} // PodSandboxStatus returns the status of the PodSandbox. If the PodSandbox is not // present, returns an error. rpc PodSandboxStatus(PodSandboxStatusRequest) returns (PodSandboxStatusResponse) {} // ListPodSandbox returns a list of PodSandboxes. rpc ListPodSandbox(ListPodSandboxRequest) returns (ListPodSandboxResponse) {} // CreateContainer creates a new container in specified PodSandbox rpc CreateContainer(CreateContainerRequest) returns (CreateContainerResponse) {} // StartContainer starts the container. rpc StartContainer(StartContainerRequest) returns (StartContainerResponse) {} // StopContainer stops a running container with a grace period (i.e., timeout). // This call is idempotent, and must not return an error if the container has // already been stopped. // TODO: what must the runtime do after the grace period is reached? rpc StopContainer(StopContainerRequest) returns (StopContainerResponse) {} // RemoveContainer removes the container. If the container is running, the // container must be forcibly removed. // This call is idempotent, and must not return an error if the container has // already been removed. rpc RemoveContainer(RemoveContainerRequest) returns (RemoveContainerResponse) {} // ListContainers lists all containers by filters. rpc ListContainers(ListContainersRequest) returns (ListContainersResponse) {} // ContainerStatus returns status of the container. If the container is not // present, returns an error. rpc ContainerStatus(ContainerStatusRequest) returns (ContainerStatusResponse) {} // UpdateContainerResources updates ContainerConfig of the container. rpc UpdateContainerResources(UpdateContainerResourcesRequest) returns (UpdateContainerResourcesResponse) {} // ExecSync runs a command in a container synchronously. rpc ExecSync(ExecSyncRequest) returns (ExecSyncResponse) {} // Exec prepares a streaming endpoint to execute a command in the container. rpc Exec(ExecRequest) returns (ExecResponse) {} // Attach prepares a streaming endpoint to attach to a running container. rpc Attach(AttachRequest) returns (AttachResponse) {} // PortForward prepares a streaming endpoint to forward ports from a PodSandbox. rpc PortForward(PortForwardRequest) returns (PortForwardResponse) {} // ContainerStats returns stats of the container. If the container does not // exist, the call returns an error. rpc ContainerStats(ContainerStatsRequest) returns (ContainerStatsResponse) {} // ListContainerStats returns stats of all running containers. rpc ListContainerStats(ListContainerStatsRequest) returns (ListContainerStatsResponse) {} // UpdateRuntimeConfig updates the runtime configuration based on the given request. rpc UpdateRuntimeConfig(UpdateRuntimeConfigRequest) returns (UpdateRuntimeConfigResponse) {} // Status returns the status of the runtime. rpc Status(StatusRequest) returns (StatusResponse) {} } // ImageService defines the public APIs for managing images. service ImageService { // ListImages lists existing images. rpc ListImages(ListImagesRequest) returns (ListImagesResponse) {} // ImageStatus returns the status of the image. If the image is not // present, returns a response with ImageStatusResponse.Image set to // nil. rpc ImageStatus(ImageStatusRequest) returns (ImageStatusResponse) {} // PullImage pulls an image with authentication config. rpc PullImage(PullImageRequest) returns (PullImageResponse) {} // RemoveImage removes the image. // This call is idempotent, and must not return an error if the image has // already been removed. rpc RemoveImage(RemoveImageRequest) returns (RemoveImageResponse) {} // ImageFSInfo returns information of the filesystem that is used to store images. rpc ImageFsInfo(ImageFsInfoRequest) returns (ImageFsInfoResponse) {} }
这其中包含了两个gRPC服务:
- RuntimeService: 容器 和 Sandbox 运行时管理
- ImageService:提供了从 镜像仓库 拉取 、 查看 、和 移除 镜像的RPC
当前支持的CRI后端
最初在使用Kubernetes时通常会默认使用Docker作为容器运行时,其实从Kubernetes 1.5开始已经开始支持CRI,目前是处于Alpha版本
通过CRI接口可以指定使用其它容器运行时作为Pod的后端,目前支持 CRI 的后端有:
- cri-o:cri-o是Kubernetes的CRI标准的实现,并且允许Kubernetes间接使用OCI兼容的容器运行时,可以把cri-o看成Kubernetes使用OCI兼容的容器运行时的中间层
- cri-containerd:基于Containerd的Kubernetes CRI 实现
- rkt:由CoreOS主推的用来跟docker抗衡的容器运行时
- frakti:基于hypervisor的CRI
- docker:kuberentes最初就开始支持的容器运行时,目前还没完全从kubelet中解耦,docker公司同时推广了OCI标准
CRI是由SIG-Node来维护的
当前通过CRI-O间接支持CRI的后端
当前同样存在一些只实现了OCI标准的容器,但是它们可以通过CRI-O来作为Kubernetes的容器运行
CRI-O是Kubernetes的CRI标准的实现,并且允许Kubernetes间接使用OCI兼容的容器运行时:
- Clear Containers:由Intel推出的兼容OCI容器运行时,可以通过CRI-O来兼容CRI
- Kata Containers:符合OCI规范,可以通过CRI-O或Containerd CRI Plugin来兼容CRI
- gVisor:由谷歌推出的容器运行时沙箱(Experimental),可以通过CRI-O来兼容CRI
CNI
CNI(Container Network Interface)是 CNCF 旗下的一个项目,由一组用于配置 Linux 容器的 网络接口 的 规范 和 库 组成,同时还包含了一些 插件 。CNI 仅关心容器创建时的网络分配,和当容器被删除时释放网络资源
Kubernetes 源码的 vendor/github.com/containernetworking/cni/libcni 目录中已经包含了 CNI 的代码,也就是说 kubernetes 中已经内置了 CNI
接口定义
CNI 的接口中包括以下几个方法:
type CNI interface { AddNetworkList (net *NetworkConfigList, rt *RuntimeConf) (types.Result, error) DelNetworkList (net *NetworkConfigList, rt *RuntimeConf) error AddNetwork (net *NetworkConfig, rt *RuntimeConf) (types.Result, error) DelNetwork (net *NetworkConfig, rt *RuntimeConf) error }
该接口只有四个方法:
- 添加网络
- 删除网络
- 添加网络列表
- 删除网络列表
设计考量
CNI 设计的时候考虑了以下问题:
- 容器运行时必须在调用任何插件之前为容器创建一个 新的网络命名空间
- 然后,运行时必须确定这个容器应属于哪个网络,并为每个网络确定 哪些插件必须被执行
- 网络配置采用 JSON 格式,可以很容易地存储在文件中
- 网络配置包括必填字段,如 name 和 type 以及插件(类型)
- 网络配置允许字段在调用之间改变值。为此,有一个可选的字段 args,必须包含不同的信息
- 容器运行时必须按 顺序 为每个网络执行相应的插件,将容器添加到每个网络中
- 在完成容器生命周期后,运行时必须以 相反的顺序 执行插件(相对于执行添加容器的顺序)以将容器与网络断开连接
- 容器运行时不能为同一容器调用并行操作,但可以为不同的容器调用并行操作
容器运行时必须为容器订阅 ADD 和 DEL 操作,这样 ADD 后面总是跟着相应的 DEL
DEL 可能跟着额外的 DEL,但是,插件应该允许处理多个 DEL(即插件 DEL 应该是幂等的)
- 容器必须由 ContainerID 唯一标识。存储状态的插件应该使用( 网络名称,容器 ID )的主键来完成
运行时不能调用同一个网络名称或容器 ID 执行两次 ADD(没有相应的 DEL)
换句话说,给定的容器 ID 必须只能添加到特定的网络一次
CNI 插件
CNI 插件必须实现一个 可执行文件 ,这个文件可以被容器管理系统(例如 rkt 或 Kubernetes)调用。CNI 插件负责:
将网络接口插入容器网络命名空间
例如,veth 对的一端
在主机上进行任何必要的改变
例如将 veth 的另一端连接到网桥
- 将 IP 分配给接口
- 通过调用适当的 IPAM 插件来设置与 “IP 地址管理” 部分一致的路由
操作
CNI 插件必须支持以下操作
将容器添加到网络
参数:
- 版本:调用者正在使用的 CNI 规范(容器管理系统或调用插件)的版本
- 容器 ID:由运行时分配的容器的唯一明文标识符。一定不能是空的
网络命名空间路径:要添加的网络名称空间的路径
即 /proc/[pid]/ns/net 或绑定挂载 / 链接
- 网络配置:描述容器可以加入的网络的 JSON 文档
- 额外的参数:这提供了一个替代机制,允许在每个容器上简单配置 CNI 插件
- 容器内接口的名称:这是应该分配给容器(网络命名空间)内创建的接口的名称,因此它必须符合 Linux 接口名称上的标准限制
结果:
- 接口列表:根据插件的不同,这可以包括沙箱(例如容器或管理程序)接口名称和 / 或主机接口名称,每个接口的硬件地址以及接口所在的沙箱(如果有的话)的详细信息
- 分配给每个接口的 IP 配置:分配给沙箱和 / 或主机接口的 IPv4 和 / 或 IPv6 地址,网关和路由
- DNS 信息:包含 nameserver、domain、search domain 和 option 的 DNS 信息的字典
从网络中删除容器
参数:
- 版本调用者:正在使用的 CNI 规范(容器管理系统或调用插件)的版本
- 容器 ID
- 网络命名空间路径
- 网络配置
- 额外的参数
- 上面定义的容器内的接口的名称。
所有参数应与传递给相应的添加操作的参数相同 删除操作应释放配置的网络中提供的 containerid 拥有的所有资源
报告版本
参数:无
结果:插件支持的 CNI 规范版本信息
{“cniVersion”:“0.3.1”,// 此输出使用的 CNI 规范的版本
“supportedVersions”:[“0.1.0”,“0.2.0”,“0.3.0”,“0.3.1”] // 此插件支持的 CNI 规范版本列表
}
IP 分配
作为容器网络管理的一部分,CNI 插件需要为接口分配(并维护)IP 地址,并安装与该接口相关的所有必要路由 这给了 CNI 插件很大的灵活性,但也给它带来了很大的负担 众多的 CNI 插件需要编写相同的代码来支持用户需要的多种 IP 管理方案(例如 dhcp、host-local)
为了减轻负担,使 IP 管理策略与 CNI 插件类型解耦,定义了 IP 地址管理插件 (IPAM 插件)
CNI 插件的职责是在执行时恰当地调用 IPAM 插件
IPAM 插件
像 CNI 插件一样,调用 IPAM 插件的可执行文件,可执行文件位于预定义的路径列表中,通过 CNI_PATH 指示给 CNI 插件 IPAM 插件必须接收所有传入 CNI 插件的相同环境变量。就像 CNI 插件一样,IPAM 插件通过 stdin 接收网络配置
- IPAM 插件必须确定接口 IP/subnet,网关和路由,并将此信息返回到 “主” 插件来应用配置
- IPAM 插件可以通过协议(例如 dhcp)、存储在本地文件系统上的数据、网络配置文件的 “ipam” 部分或上述的组合来获得信息
可用插件
Main:接口创建
- bridge :创建网桥,并添加主机和容器到该网桥
- ipvlan :在容器中添加一个 ipvlan 接口
- loopback :创建一个回环接口
- macvlan :创建一个新的 MAC 地址,将所有的流量转发到容器
- ptp :创建 veth 对
- vlan :分配一个 vlan 设备
IPAM
- dhcp :在主机上运行守护程序,代表容器发出 DHCP 请求
- host-local :维护分配 IP 的本地数据库
其他
- flannel :根据 flannel 的配置文件创建接口
- tuning:调整现有接口的 sysctl 参数
- portmap :一个基于 iptables 的 portmapping 插件。将端口从主机的地址空间映射到容器
CSI
CSI 代表容器存储接口
CSI 试图建立一个行业标准接口的规范,借助 CSI 容器编排系统(CO)可以将任意存储系统暴露给自己的容器工作负载
csi 卷类型 是一种 out-tree (即跟其它存储插件在同一个代码路径下,随 Kubernetes 的代码同时编译的) 的 CSI 卷插件,用于 Pod 与在同一节点上运行的外部 CSI 卷驱动程序交互。部署 CSI 兼容卷驱动后,用户可以使用 csi 作为卷类型来挂载驱动提供的存储
CSI 持久化卷支持是在 Kubernetes v1.9 中引入的,作为一个 alpha 特性,必须由集群管理员明确启用 换句话说,集群管理员需要在 apiserver、controller-manager 和 kubelet 组件的 “--feature-gates =” 标志中加上 “CSIPersistentVolume = true”
CSI 持久化卷具有以下字段可供用户指定:
- driver :一个字符串值,指定要使用的卷驱动程序的名称。必须少于 63 个字符,并以一个字符开头。驱动程序名称可以包含 '.' '-' '_' 或数字
- volumeHandle :一个字符串值,唯一标识从 CSI 卷插件的 CreateVolume 调用返回的卷名。随后在卷驱动程序的所有后续调用中使用卷句柄来引用该卷
- readOnly :一个可选的布尔值,指示卷是否被发布为只读。默认是 false
使用
动态配置
可以通过为 CSI 创建插件 StorageClass 来支持动态配置的 CSI Storage 插件启用自动创建/删除
例如,以下 StorageClass 允许通过名为 com.example.team/csi-driver 的 CSI Volume Plugin 动态创建 “fast-storage” Volume
kind: StorageClass apiVersion: storage.k8s.io/v1 metadata: name: fast-storage provisioner: com.example.team/csi-driver parameters: type: pd-ssd
要触发动态配置,请创建一个 PersistentVolumeClaim 对象
例如,下面的 PersistentVolumeClaim 可以使用上面的 StorageClass 触发动态配置
apiVersion: v1 kind: PersistentVolumeClaim metadata: name: my-request-for-storage spec: accessModes: - ReadWriteOnce resources: requests: storage: 5Gi storageClassName: fast-storage
当动态创建 Volume 时:
- 通过 CreateVolume 调用,将参数 type:pd-ssd 传递给 CSI 插件 com.example.team/csi-driver
- 作为响应, 外部 Volume 插件 会 创建 一个 新 Volume ,然后自动创建一个 PersistentVolume 对象 来 对应 前面的 PVC
- Kubernetes 会将新的 PersistentVolume 对象 绑定 到 PersistentVolumeClaim,使其可以使用
如果 fast-storage StorageClass 被标记为默认值,则不需要在 PersistentVolumeClaim 中包含 StorageClassName,它将被默认使用
预配置 Volume
可以通过手动创建一个 PersistentVolume 对象来展示现有 Volumes,从而在 Kubernetes 中暴露预先存在的 Volume
例如,暴露属于 com.example.team/csi-driver 这个 CSI 插件的 existingVolumeName Volume
apiVersion: v1 kind: PersistentVolume metadata: name: my-manually-created-pv spec: capacity: storage: 5Gi accessModes: - ReadWriteOnce persistentVolumeReclaimPolicy: Retain csi: driver: com.example.team/csi-driver volumeHandle: existingVolumeName readOnly: false
附着和挂载
可以在任何的 pod 或者 pod 的 template 中引用绑定到 CSI volume 上的 PersistentVolumeClaim:
kind: Pod apiVersion: v1 metadata: name: my-pod spec: containers: - name: my-frontend image: dockerfile/nginx volumeMounts: - mountPath: "/var/www/html" name: my-csi-volume volumes: - name: my-csi-volume persistentVolumeClaim: claimName: my-request-for-storage
当一个引用了 CSI Volume 的 pod 被调度时, Kubernetes 将针对外部 CSI 插件进行相应的操作,以确保特定的 Volume 被 attached、mounted, 并且能被 pod 中的容器使用
创建 CSI 驱动
Kubernetes 尽可能少地指定 CSI Volume 驱动程序的打包和部署规范
最低要求文件还包含概述部分,提供了在 Kubernetes 上部署任意容器化 CSI 驱动程序的建议机制 存储提供商可以运用这个机制来简化 Kubernetes 上容器式 CSI 兼容 Volume 驱动程序的部署
作为推荐部署的一部分,Kubernetes 团队提供以下 sidecar(辅助)容器:
- External-attacher: 可监听 Kubernetes VolumeAttachment 对象并触发 ControllerPublish 和 ControllerUnPublish 操作的 sidecar 容器,通过 CSI endpoint 触发
- External-provisioner: 监听 Kubernetes PersistentVolumeClaim 对象的 sidecar 容器,并触发对 CSI 端点的 CreateVolume 和DeleteVolume 操作
- Driver-registrar(DEPRECATED): 使用 Kubelet(将来)注册 CSI 驱动程序的 sidecar 容器,并将 NodeId (通过 GetNodeID 调用检索到 CSI endpoint)添加到 Kubernetes Node API 对象的 annotation 里面
- Cluster Driver Registrar: 创建 CSIDriver 这个集群范围的 CRD 对象
- Node Driver Registrar: 替代 Driver-registrar
存储供应商完全可以使用这些组件来为其插件构建 Kubernetes Deployment,同时让它们的 CSI 驱动程序完全意识不到 Kubernetes 的存在 另外 CSI 驱动完全是由第三方存储供应商自己维护的,在 kubernetes 1.9 版本中 CSI 还处于 alpha 版本